1
/
of
5
Aerotate
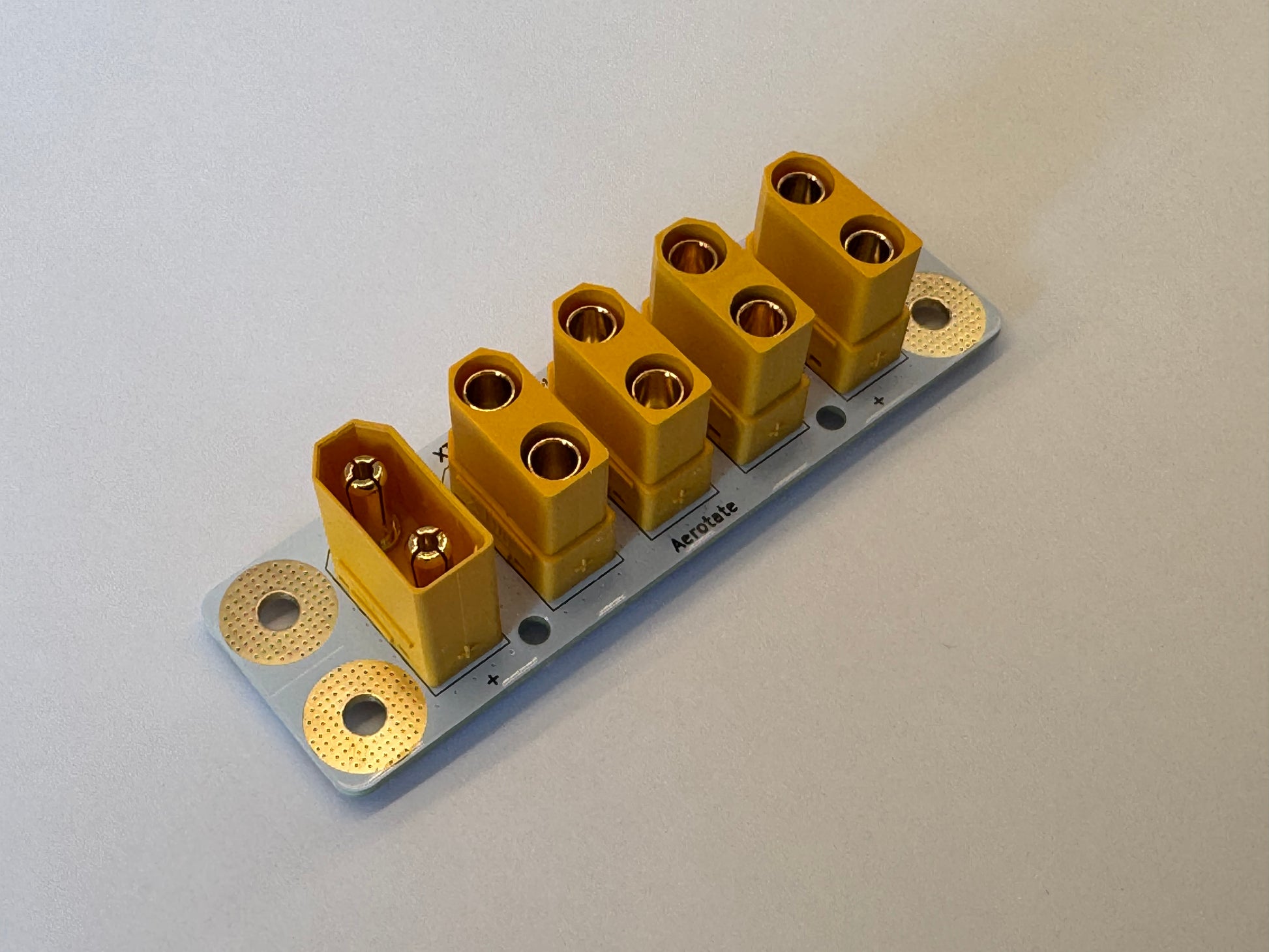
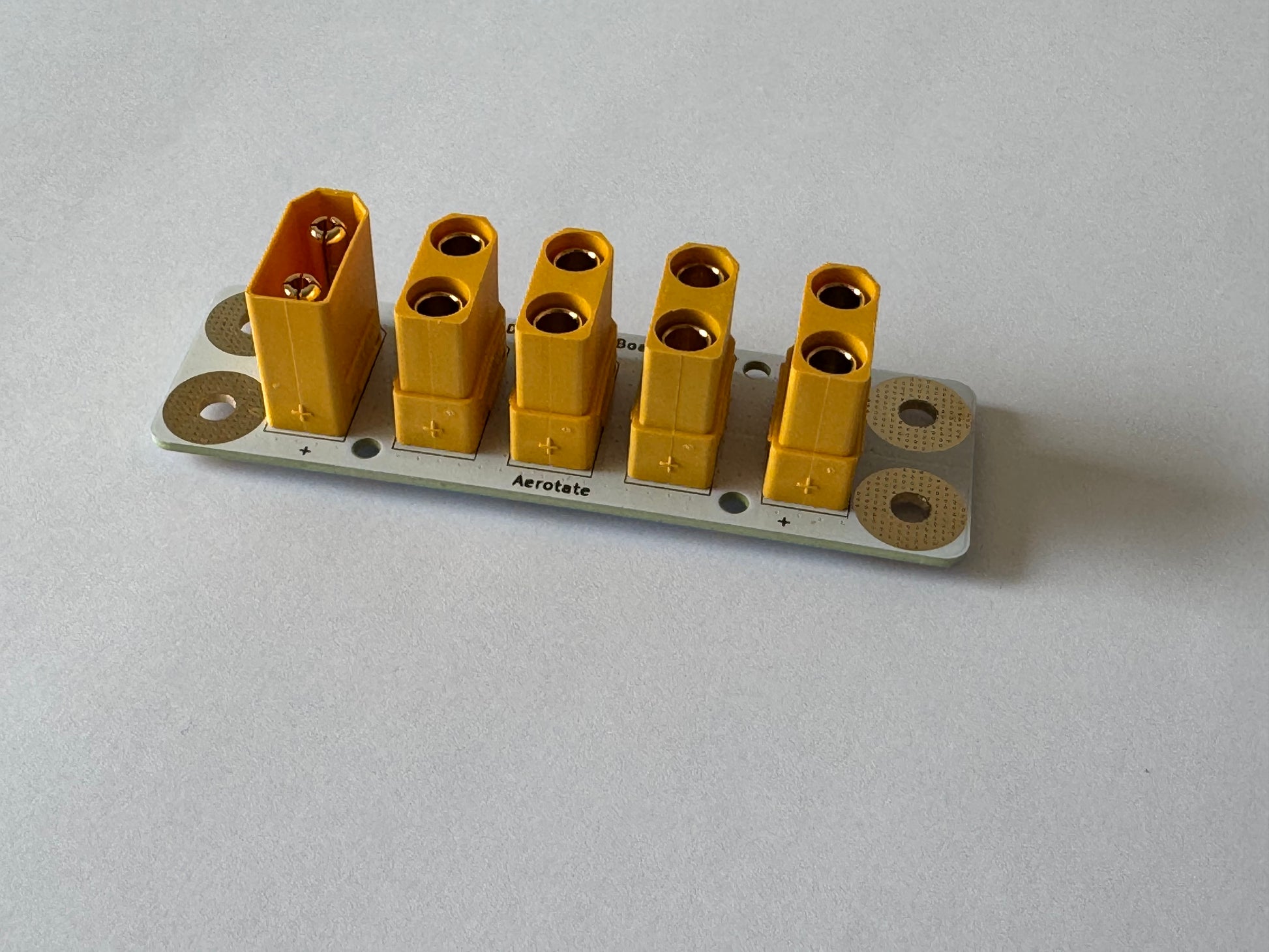
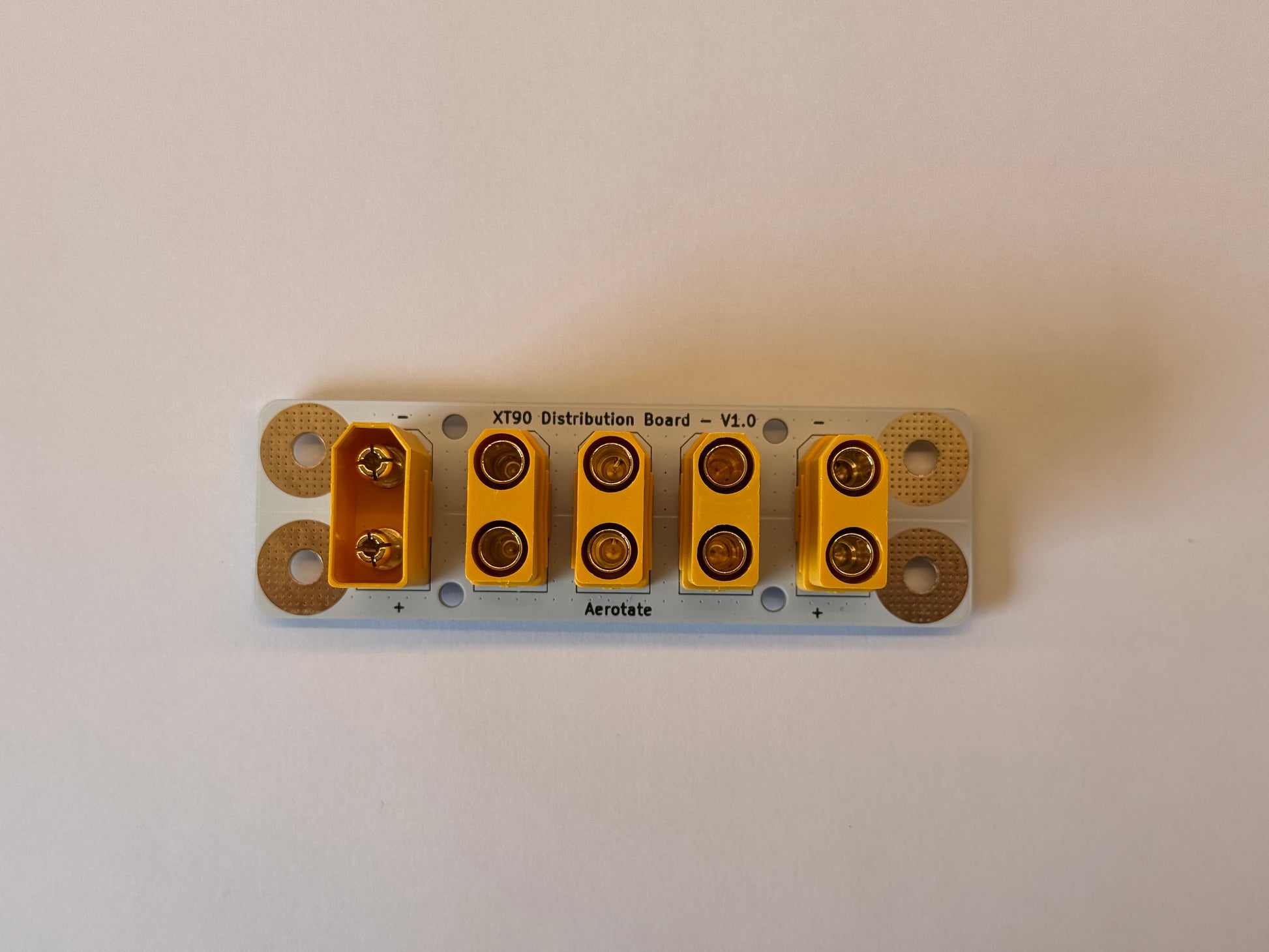
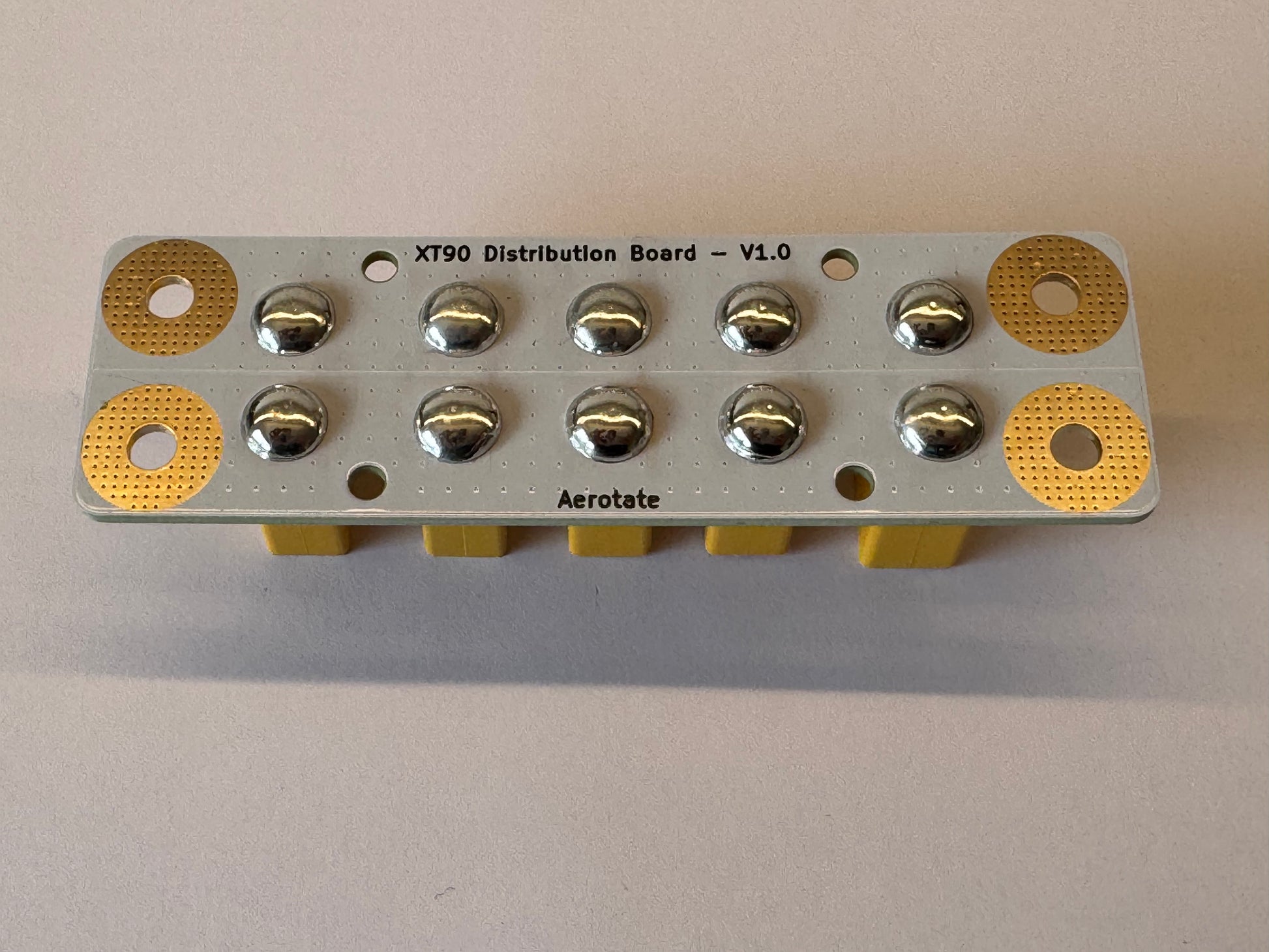
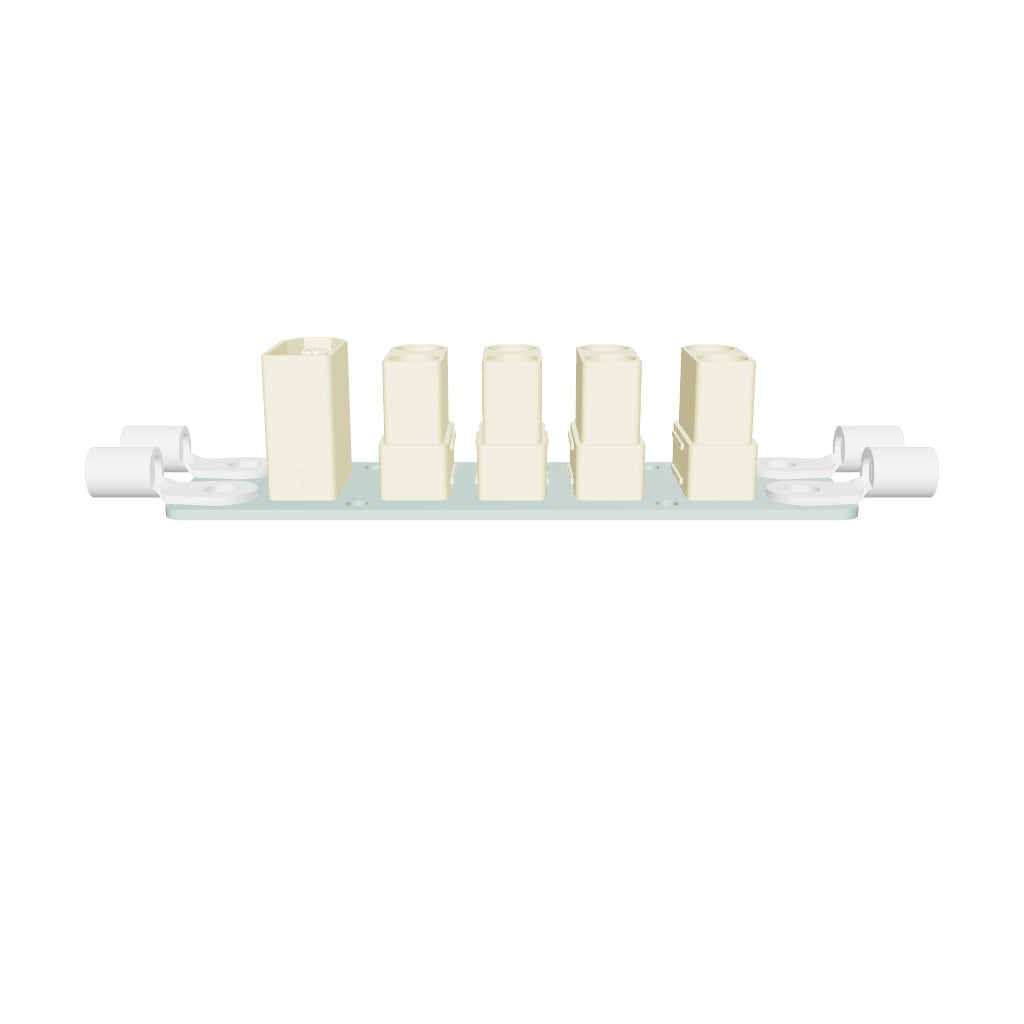
XT90 Power Distribution Board – 1 Male to 4 Female with M4 Screw Terminals
XT90 Power Distribution Board – 1 Male to 4 Female with M4 Screw Terminals
Regular price
€18,50 EUR
Regular price
Sale price
€18,50 EUR
Unit price
/
per
without tax
Couldn't load pickup availability
Robust. Reliable. Robotics-Ready.
Power your robotics projects with confidence using this industrial-grade XT90 distribution board. Designed for high-current applications and engineered with precision, this board distributes power from one XT90 Male input to four XT90 Female outputs—perfect for complex systems such as autonomous robots, drones, or mobile platforms.
Key Features:
-
Connector Setup:
- 1 × XT90 Male input
- 4 × XT90 Female outputs
- M4 screw terminals on each port for secure secondary connections (sensor power, auxiliary boards, or measurement taps)
-
Current Handling:
Ideal for high-power applications requiring reliable XT90 connections—commonly used in robotics, RC vehicles, and drone systems. -
Modular Design:
Mount-friendly layout allows clean integration into your powertrain system with minimal cable clutter. -
Robotics Application Ready:
Supports distributed motor controllers, parallel battery configurations, and multi-load power distribution in autonomous machines and robotic arms. -
Build Quality:
Heavy-duty PCB with thick copper traces and heat-resistant XT90 terminals—built to handle real-world robotics conditions.
Technical Specifications:
- Input: 1 × XT90 Male
- Outputs: 4 × XT90 Female
- Additional I/O: 4 × M4 screw terminals per side
- Rated Current: Up to 90A total (XT90 rated)
- Mounting Holes: Pre-drilled for M3 for secure chassis integration
- Dimensions: 98mm x 30mm
- Weight: tbd
Use Case Examples:
- Power distribution in multi-motor robotic platforms
- Centralized power delivery for drone ESCs
- Mobile lab equipment and field-deployable systems
- Custom battery packs for automation hardware
Share




Datasheets and Manuals
aeroPAX6 smart battery
ROS Node Implementation Github - aeroPAX-Ros
Python Connection Github - aeroPAX-python
Update of the aeroPAX Smart Batteries
aeroPAX KIT
Assembly instructions for BMS Kit
aeroPAX6 carrier
This manual explains how the addresses for CAN bus communication must be set.
aeroPAX6 smart charger
Datasheet aeroPAX6 smart charger
Ardupilot integration