Aerotate
DroneCAN / I2C Distribution Board – ArduPilot / PX4 / Pixhawk Compatible
DroneCAN / I2C Distribution Board – ArduPilot / PX4 / Pixhawk Compatible
without tax
Couldn't load pickup availability
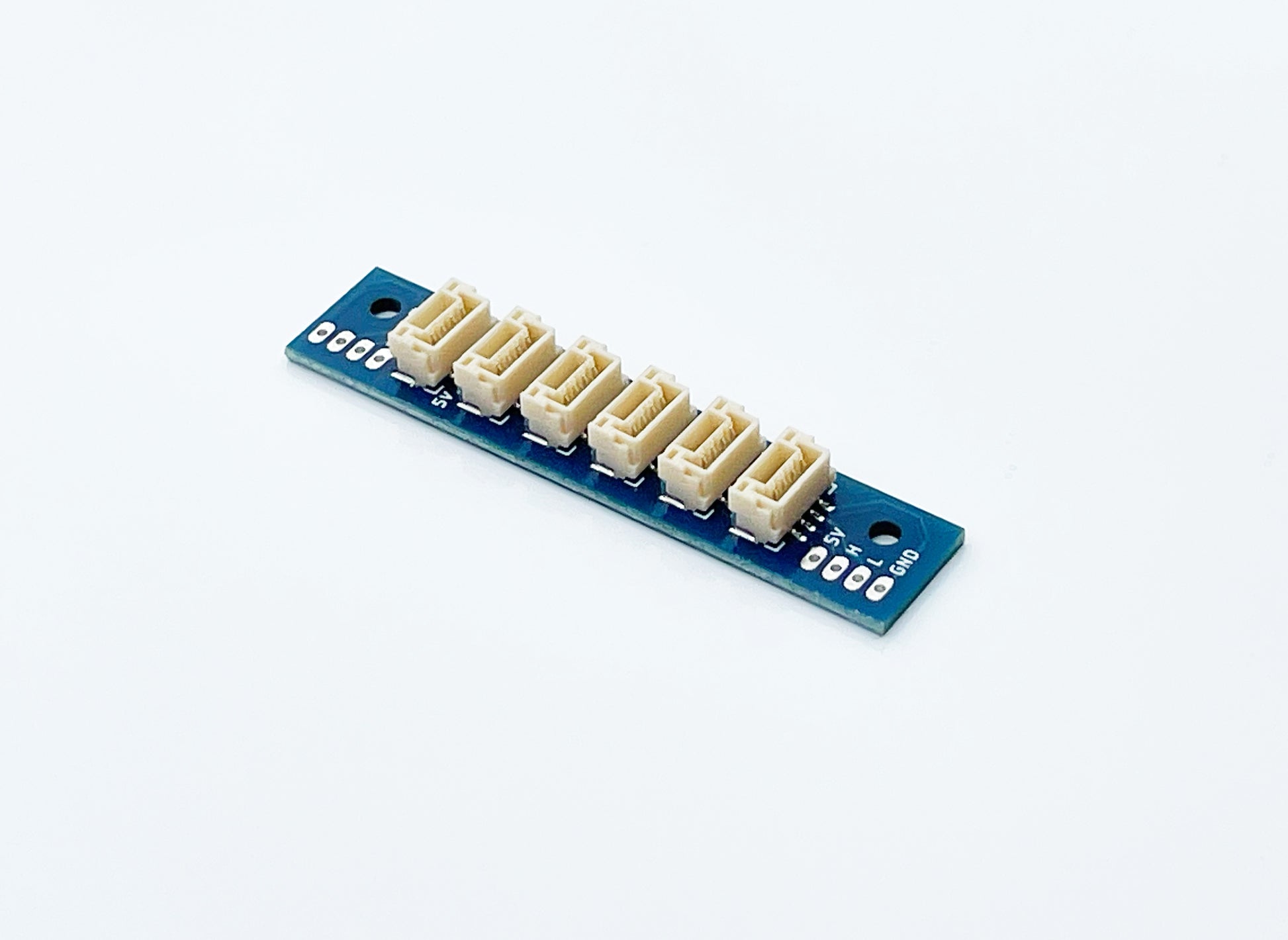
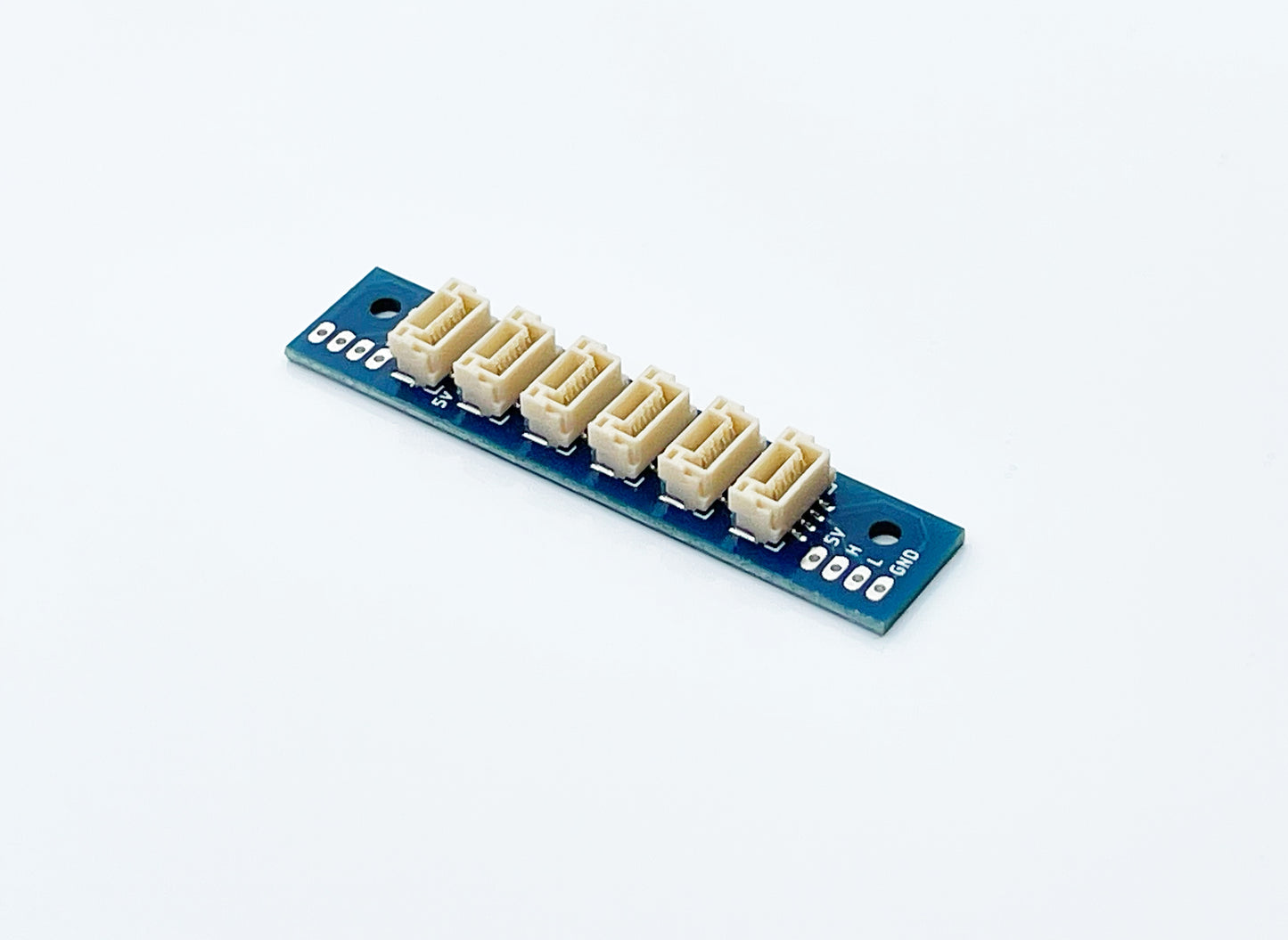
The CAN/I2C distribution board is a compact and practical solution for expanding and organizing bus connections in embedded systems such as drones, robotics platforms, and autopilot systems. Designed with flexibility in mind, it features six 4-pin JST GH ports for quick plug-and-play device connections, as well as additional breakout options for custom setups.
Key Features
Connector Configuration:
- 6 × 4-pin JST GH connectors (1.25 mm pitch)
- Supports both CAN and I2C signal distribution depending on system use
- Parallel routing for clean bus splitting
Solderable Breakout Options:
- Solder pads available on both sides of the PCB for direct wire connections
- One edge supports optional 2.54 mm (0.1") header pin installation for breakout to breadboards or dev boards
Mounting:
- 2 × M3 mounting holes (one on each end) for secure attachment to frame or baseplate
- Suitable for integration in UAVs, mobile robots, and compact control boxes
System Compatibility:
- Fully compatible with Pixhawk, Cube, and other ArduPilot / PX4 systems
- Ideal for connecting GPS, airspeed sensors, magnetometers, or any JST-GH-based peripheral
- Compatible cabling available separately
Applications
- Distribute CAN or I2C signals across multiple embedded peripherals
- Build modular harnesses for field-replaceable drone components
- Simplify internal wiring in robotics and flight control systems
- Enable prototyping or debugging with 2.54 mm header breakout
Technical Specifications
| Parameter | Value |
|---|---|
| Ports | 6 × JST GH 4-pin (parallel routing) |
| Signal Support | CAN or I2C (bus-agnostic design) |
| Additional IO | Dual-side solder pads; 1 × 2.54 mm header footprint |
| Mounting | 2 × M3 holes (symmetric placement) |
| Supply Voltage | 3.3 V or 5 V signal logic compatible |
| Board Dimensions | 59 mm x 12 mm |
This board is ideal for maintaining clean, expandable wiring in space-constrained systems where reliability and modularity are critical.
Share
Datasheets and Manuals
aeroPAX6 smart battery
ROS Node Implementation Github - aeroPAX-Ros
Python Connection Github - aeroPAX-python
Update of the aeroPAX Smart Batteries
aeroPAX KIT
Assembly instructions for BMS Kit
aeroPAX6 carrier
This manual explains how the addresses for CAN bus communication must be set.
aeroPAX6 smart charger
Datasheet aeroPAX6 smart charger
Ardupilot integration