1
/
of
1
Aerotate
JST GH to RJ45 Ethernet Cable – 4-Pin - 100Mbit
JST GH to RJ45 Ethernet Cable – 4-Pin - 100Mbit
Regular price
€6,40 EUR
Regular price
Sale price
€6,40 EUR
Unit price
/
per
without tax
Couldn't load pickup availability
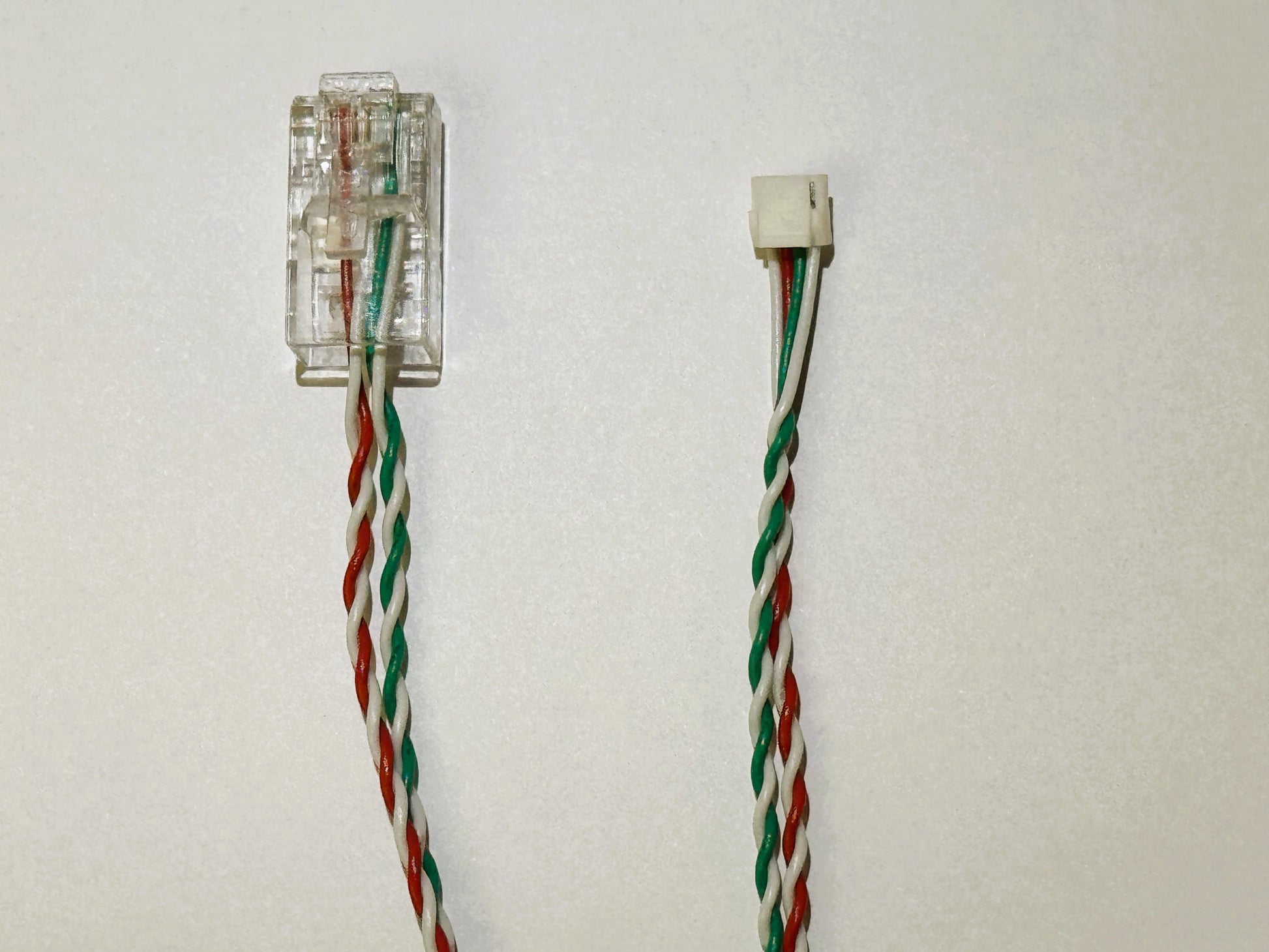
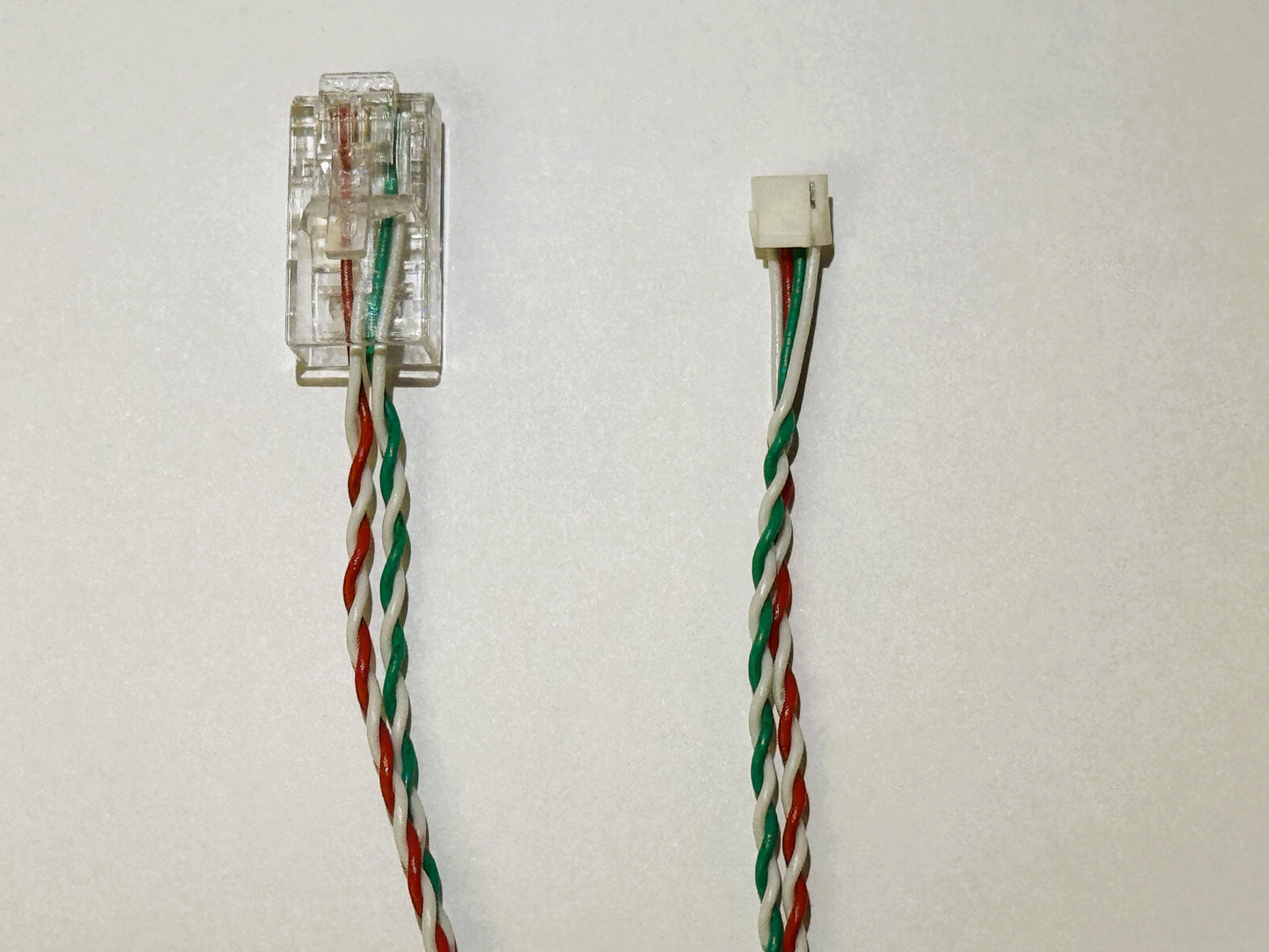
This compact Ethernet cable is intended for embedded 100BASE-TX applications where space and connector size are constrained. It interfaces a JST GH 4-pin (1.25 mm pitch) Ethernet PHY header to a standard RJ45 (8P8C) Ethernet port. The cable is suitable for short-distance, low-noise environments such as laboratory setups, drones, or internal system wiring.
Technical Description
- Ethernet Standard: 100BASE-TX (IEEE 802.3u)
- Transmission Speed: 100 Mbit/s (full or half duplex)
- Cable Length: 50mm - 1000mm
- Cable Type: Unshielded, custom-terminated
- Impedance Matching: Not controlled (intended for ≤30 cm use)
- Twisting: R+/R− and T+/T− signals are individually twisted as differential pairs
- Connector A: JST GH 4-pin (horizontal mount, 1.25 mm pitch)
-
Connector B: RJ45 (8P8C), standard Ethernet plug, T568B-compatible mechanical interface
Signal Pinout (Fixed)
| RJ45 Pin | Signal | JST GH Pin | Wire Color |
|---|---|---|---|
| 1 | TX+ | 4 | White |
| 2 | TX− | 3 | Green |
| 3 | RX+ | 1 | White |
| 6 | RX− | 2 | Red |
RJ45 pins 4, 5, 7, and 8 are left unconnected (NC).
Intended Use
- Embedded systems with Ethernet PHY routed to JST GH header
- Drones, sensor systems, and compact robotic platforms
- Ethernet breakout or adapter cable for internal assemblies
- Board-to-port bridging in test setups or low-noise enclosures
Assembly Notes
- Each differential pair (TX and RX) is individually twisted to reduce intra-pair skew and minimize crosstalk
- Not suitable for PoE (Power over Ethernet)
- Crimped and continuity-tested for reliability
- Lightweight and flexible for constrained routing paths
Share
Datasheets and Manuals
aeroPAX6 smart battery
ROS Node Implementation Github - aeroPAX-Ros
Python Connection Github - aeroPAX-python
Update of the aeroPAX Smart Batteries
aeroPAX KIT
Assembly instructions for BMS Kit
aeroPAX6 carrier
This manual explains how the addresses for CAN bus communication must be set.
aeroPAX6 smart charger
Datasheet aeroPAX6 smart charger
Ardupilot integration